Guia de Simulink
Robot.mdl
Em primeiro lugar é necessário referir que serão necessários pré-requesitos para a realização desta actividade. Em primeiro lugar será necessária a instalação do Matlab (toolbox’s pré-definidas da instalação são suficientes). O modelo em Simulink foi realizado em Matlab R2006a, e será possível correr na versão R2006b, contudo o seu funcionamento em versões mais antigas não é possível.
Figura 1 – Versão de Matlab utilizada
De seguida será necessária a instalação de todo o software de base da National Instruments (fornecido com a placa USB6008 que controla o robot), bem como um upgrade que se pode facilmente obter na página do fabricante, NIDAQ830.ZIP (necessita de registo grátis).
Uma vez instalado o software necessário é possível passar ao próximo passo, colocar a directoria de trabalho como sendo a pasta fornecida, a que contem o modelo em Simulink – robot.mdl.
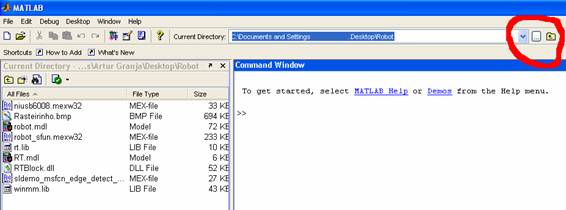
Figura 2 – Directoria de Trabalho
Fazendo um double-click em robot.mdl e esperando, o Simulink abre o modelo.
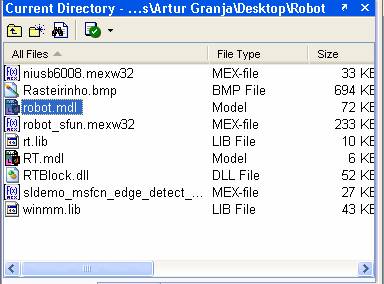
Figura 3 – Ficheiros fornecidos
Uma vez aberta esta será a janela visualizada.
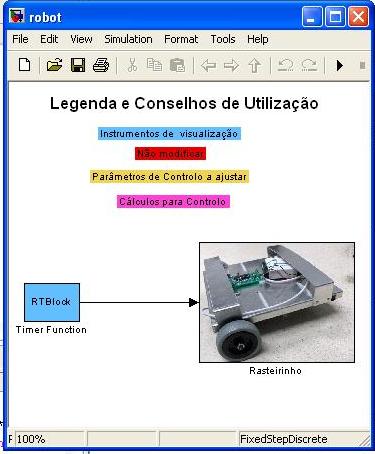
Figura 4 – Janela inicial do modelo fornecido - robot
Desde já estão apresentados os conselhos de utilização, contudo o modelo deve ser explorado e modificado de acordo com os conhecimentos e convicções de melhores procedimentos de cada um.
Se realizar um double-click na foto, ou seja, no bloco “Rasteirinho”, podemos ver o diagrama que de controlo que lá se encontra. O Simulink permite fazer blocos organizados por hierarquias, assim sendo a primeira janela apresentada será o “Master”, e todas as subsequentes posicionadas mais abaixo na hierarquia, como se pode ver no nome de cada uma das janelas.
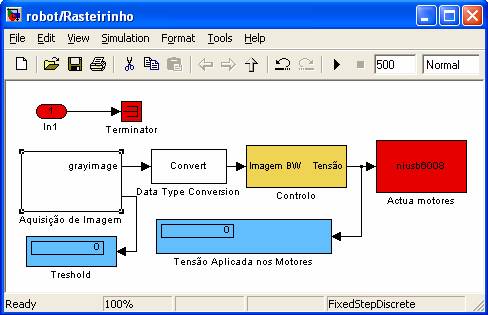
Figura 5 – Segunda janela – robot/Rasteirinho
Com um double-click no bloco de Aquisição de Imagem podemos configurar os parâmetros desta, como a câmara a utilizar, os restantes não é aconselhada a sua modificação. Este procedimento também pode ser realizado com o bloco de Autothreshold.
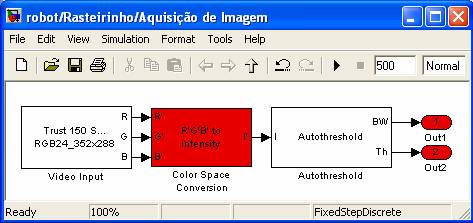
Figura 6 – Aquisição de imagem – robot/Rasteirinho/Aquisição de Imagem
Mais uma vez com um double-click no bloco de Controlo entramos no verdadeiro controlo do robô, onde temos os parâmetros a ajustar.
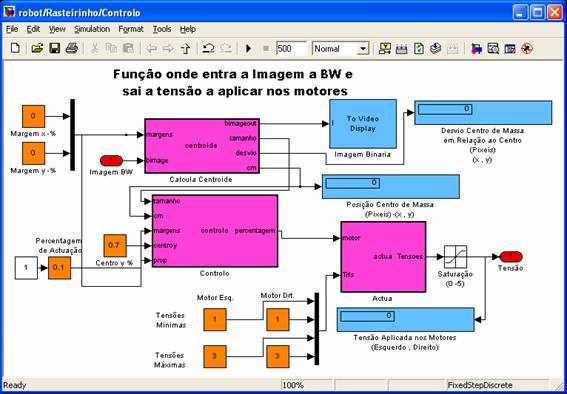
Figura 7 – Controlo do robot
Os parâmetros a ajustar são:
· Margem x / Margem y – percentagem da imagem a cortar, de forma a não analisar toda a imagem disponível.
· Centro y – percentagem da imagem onde vamos considerar o centro de massa em y.
· Tensões Mínimas/Máximas – tensão mínima e máxima a aplicar nos motores.
Para a realização da prova apenas será necessário regular estes parâmetros de controlo e realizar um critério de paragem, por forma a o robô parar no local pretendido.
Boa Sorte!!
Artur Granja - Setembro@2006