1.5.1 Teste das cartas PMD, interface de potência e motores
Tendo o robô com a carta PMD ligada aos motores através da interface de potência, o programa “MotorTest” permite controlar os motores individualmente. Se o portátil sobre o robô estiver equipado com uma ligação sem fio torna-se bastante cómodo realizar estes testes.
Os passos para a realização do programa são os seguintes:
- Certificar-se que a carta PMD foi correctamente instalada e que a “universal library” também o foi. Na prática, a instalação da “universal library” basta pois esta instala também o InstaCal.
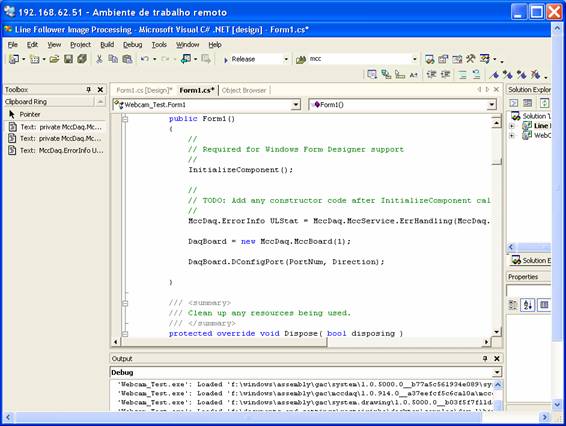
- Depois de criar o projecto MotorTest, deve incluir as referências para aceder aos métodos definidos na “Universal Library” para a carta. Trata-se da dll MccDaq, cuja referencia deve ser adicionada conforme se indica na figura seguinte. Se não se adicionar esta biblioteca, o compilador dará erro em todas as funções de acesso à carta PMD.

- Depois de criar o projecto MotorTest, deve incluir os construtores para poder aceder aos métodos definidos para a carta PMD.
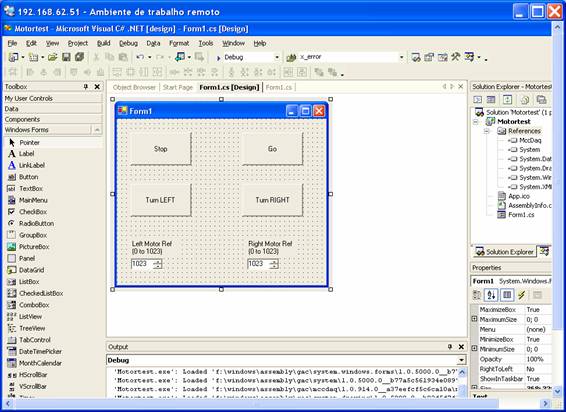
- A parte mais simples, consiste em criar os menus que permitam realizar a interface com o utilizador e fazer com que a cada click sejam chamadas as funções que atacam os motores com os valores que pretendermos. Por exemplo, usando as ferramentas do menu toolbox, podemos criar a seguinte aplicação:
- Clicando por exemplo, no botão stop, podemos introduzir o código correspondente a este evento.
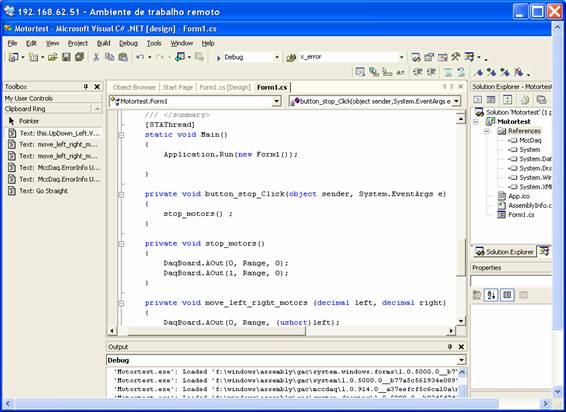
- Como vemos o click no botão de stop faz com que seja chamada a função stop_motors() que está definida logo a seguir. A função stop_motors() contêm as chamadas às funções DaqBoard que fazem parar os motores.
- Fazendo o programa para completar as restantes funções (ou fazendo download do programa completo), poderá colocar o robô a funcionar e verificar o seu comportamento.
O ficheiro MotorTest.avi mostra os resultados da execução deste programa, do qual a janela seguinte mostra uma imagem. Note-se que o filme MotorTest.avi foi obtido estando o programa MotorTest a correr no portátil que estava ligado a um computador de secretária através de uma ligação sem fio. A imagem que se vê na figura provem de uma câmara ligada ao computador de secretária que permite ver os movimentos que o robot realiza.

Pelos testes realizados é desde já possível verificar que:
O conjunto interface de potência / motores é fortemente não linear. Para uma tensão aplicada progressivamente verificamos que até cerca de 50% do valor máximo praticamente não há evolução no estado dos motores, sendo que a partir desse valor se chega rapidamente ao máximo. A partir de 90% já praticamente não há variação, rodando os motores já à velocidade máxima. Esta situação, que facilmente se resolveria se os motores estivessem dotados de encoders, deve-se essencialmente aos seguintes motivos:
· Todos os motores têm uma determinada zona morta. Sendo estes motores destinados a fazer força para apertar ou desapertar parafusos, não admira que possam ter uma zona morta bastante alargada pois tal não se traduz num mau desempenho da aparafusadora.
· A interface de potência pode não estar a conseguir debitar o máximo da potência. Com efeito, vendo os sinais ao osciloscópio, verifica-se que o sinal não chega bem aos 3,6 volt.
· O sistema para ser simples, dispensou os tradicionais encoders que permitiriam ter um anel fechado para o controlo dos motores e aí muitos destes problemas poderiam ser minimizados. O não recurso a encoders deveu-se ao elevado custo dos mesmos (cerca de 50-100 Euro cada). A possibilidade de adaptar encoders de ratos de computador (nomeadamente ratos ópticos) abre possibilidades interessantes J
Estes problemas não são, no entanto, nada com que não se possa viver. O sistema global fecha o anel pela câmara pelo que será possível ter um sinal de referência que sirva para colocar os motores a andar com a velocidade e direcção que pretendermos, apenas limitados pelos motores e pelo ritmo de amostragem das imagens provenientes da câmara.