O pequeno e económico robô móvel tem um chassis base mudando essencialmente o tipo de controlo que se pode realizar sobre ele
que inclui versões para PC, para PLC, para Microcontrolador e Pocket PC. Em Março de 2004 encontra-se disponível a versão para PC.
1.2 Características Gerais
1.2.1 Construção Mecânica/Morfologia
1.2.1.1 Introdução
Existem vários tipos de morfologia para robôs móveis. De uma forma geral os robôs móveis podem distinguir-se em robôs com pernas
e robôs com rodas.
Os robôs com pernas classificam-se segundo o número de pernas, existindo actualmente um já elevado número de protótipos experimentais e mesmo robôs comerciais (essencialmente com fins lúdicos). Apresenta-se seguidamente uma pequena amostra de
robôs com pernas existentes:
o Com apenas uma perna (monópedes), nomeadamente [3D Hooper], [UniRoo ].
o Com duas pernas (bípedes), nomeadamente [Qrio], [Asimo], [Honda], [Johnnie].
o Com quatro pernas (quadrúpedes), nomeadamente [Tekken II], [Aibo].
o Com seis pernas (hexápodes), nomeadamente [UIUC],[Tarry].
o Com oito (octópodes) ou mais pernas, nomeadamente [Mouret]
A construção de robôs com pernas constitui um desafio bastante aliciante e compensador. Como para qualquer robô, mas mais em particular para estes, a simulação prévia da viabilidade destes robôs é importante para o seu sucesso. Ao longo do curso, nas
disciplinas de modelação e controlo de sistemas, o aluno poderá adquirir conhecimentos úteis nesta área que lhe permitirão eventualmente vir a realizar robôs estáveis.
De construção mais simples e mais fáceis de controlar, os robôs com rodas constituem a abordagem mais simples para um principiante. Existem entretanto também várias topologias, variando o número de rodas, o tipo de tracção e a forma como o robot pode mudar de direcção.
Quatro rodas motrizes (ou mais)
Lagartas
Eixo de rotação
Tracção diferencial
Omnidirecionais
Etc.
### to be continued
1.2.1.2 Construção Mecânica - Conclusões
Foram mostradas varias morfologias de robôs que poderão estimular a imaginação do leitor. Como primeira abordagem verifica-se que um chassis com três rodas em que duas são motrizes e uma é livre, constitui a forma mais simples de construir um robô móvel, uma vez que evita o recurso a um diferencial mecânico e permite uma mobilidade elevada do robô.
Desta forma o primeiro robô da série, foi construído usando um sistema de tracção diferencial.
1.2.2 Materiais de Construção
1.2.2.1 Introdução
A escolha dos materiais de construção determina em grande parte a robustez do robô. De uma forma geral pretende-se um material fácil de trabalhar, leve e resistente. Estas características são muitas vezes antagónicas. Como exemplos de materiais de construção usualmente empregues, podemos citar:
- Madeira – a madeira tem inúmeras características interessantes: leveza, facilidade de corte, facilidade de ligação de elementos, etc. É um dos materiais mais económicos e fácil de obter no mercado.
- Plástico – existem vários tipos de plásticos, nomeadamente acrílicos, PVC, etc. Em modelismo encontram-se plásticos bastante leves e resistentes. São mais difíceis de trabalhar que a madeira mas podem ser bastante resistentes. São uma alternativa interessante, mas não directamente para principiantes.
- Alumínio – tem a vantagem de ser bastante leve e resistente mas é comparativamente com os anteriores, o menos fácil de trabalhar não podendo sequer os vários elementos serem soldados.
Existe também a possibilidade de recorrer a soluções comerciais nomeadamente LEGO (LEGO Mindsttorms), Mecano, Fisher, etc, bem como muitas plataformas existentes para modelismo.
1.2.2.2 Materiais de Construção - Conclusões
O facto de os robôs desta série terem nascido num laboratório de Engenharia Mecânica de alguma forma pesou fortemente na escolha dos materiais a utilizar. A dificuldade em trabalhar alumínio não existe em laboratórios onde haja técnicos competentes e material adequado. Desta forma, o material escolhido para a construção do chassis foi o alumínio.


1.2.2.3 Matérias lectivas relacionáveis
Nas disciplinas de desenho os alunos podem exercitar as suas capacidades de realização de modelos 3D criando desenhos dos modelos a realizar. A realização prévia de desenhos usando um CAD adequado (como por exemplo o SolidWorks que é usado nas disciplinas de desenho do IST) permite definir os vários componentes do robô e pré-visualizar o seu aspecto final. Para além de permitir fazer uma concepção mais eficiente, os desenhos e filmes virtuais gerados constituem uma excelente forma de promoção do produto a realizar podendo ser determinante para a conquista de eventuais patrocinadores para o projecto.
As figuras seguintes mostram vários desenhos realizados para o estudo prévio que antecedeu a realização do G-Force [Moreira & Abrantes 2003]###.






1.2.3.1 Introdução
Os motores são dos elementos fundamentais para o sucesso de um robô. Do seu correcto dimensionamento depende grande parte da controlabilidade de um robô e da destreza que é possível transmitir-lhe.
A compra de motores e caixas redutoras associadas pode atingir valores proibitivos. O G-Force , equipado com componentes industriais de qualidade dispõe de servomotores cujo custo unitário ultrapassa o milhar de euros, para além de dispor de cartas adequadas e específicas para o seu controlo cujo custo é da mesma ordem de grandeza. Tem no entanto performances invejáveis, tanto em posicionamento como em controlo de velocidade, para além de um excelente rendimento energético.
Esta solução está no entanto fora do alcance de um principiante sendo reservada a alunos privilegiados que, em anos finais da licenciatura, têm a possibilidade de realizar trabalhos nessa montra tecnológica importante.
Para os principiantes apresentamos nesta secção apresentamos vários tipos de motores, fundamentos básicos para o seu funcionamento, adaptações frequentes de soluções já existentes no mercado, e finalmente a solução sobre a qual a nossa escolha recaiu para a realização do kit básico.
1.2.3.2 Tipos de motores
A escolha do tipo de motor adequado para um determinado robô não é simples. Existe uma infinidade de motores com vários tamanhos e princípios de funcionamento. Analisando apenas os motores eléctricos, resumidamente, a escolha poderá fazer-se entre:
- Motores de corrente contínua (magnete permanente) – Trata-se do tipo de motor mais simples e mais frequentemente utilizados. São dos mais económicos essencialmente pró serem dos mais difundidos. Têm em geral um binário baixo a baixa rotação pelo que funcionam a uma velocidade nominal alta (tipicamente acima de 10000 rpm) e necessitam de uma caixa redutora para a transmissão às rodas, que leva a velocidade aos valores aceitáveis para uma roda (dependendo naturalmente do diâmetro da roda, as velocidades máximas típicas de rotação andam à volta de algumas centenas de rpm). As escovas são normalmente o calcanhar de Aquiles deste tipo de motores uma vez que sofrem desgaste e são fonte de perturbações electromagnéticas.
- Motores sem escovas (Brushless) – de alguma forma podemos dizer que funcionam de forma inversa aos motores de corrente contínua: O rotor é que é constituído por um íman permanente sendo sobre os enrolamentos do estator que um controlador adequado faz percorrer as correntes necessárias para imprimir o movimento circular pretendido. Tem a vantagem de possuir binários mais elevados a baixas velocidades (nem sempre suficientes para evitar a necessidade de caixas redutoras) mas têm o inconveniente de ser bastante mais caros e exigiram controladores mais complexos.
- Motores passo a passo – ###to be continued
1.2.3.3 Dimensionamento de motores
Princípios básicos
Relação entre velocidade e tensão/corrente aplicadas
Relação entre binário e tensão/corrente aplicadas
Corrente em vazio
Corrente com o motor preso (stall current)
Potência e eficiência
Determinação das constantes do motor
### to be continued
1.2.3.4 Adaptações de produtos de consumo
Para principiantes existe uma panóplia de soluções no mercado que podem ser adaptadas à construção de pequenos robôs móveis, como sejam:
- Motores, redutoras e chassis de brinquedos [###robot do João Reis]– trata-se de uma solução simples e económica ### to be continued
- Motores e redutoras existentes nos automóveis – os
automóveis dispõe de alguns motores que podem ser adaptados a robôs mais
potentes.
- Os motores de limpa vidros, são reversíveis e silenciosos, vindo já equipados com as necessárias redutoras. Têm o inconveniente de necessitar de tensões e correntes mais elevadas o que exige baterias mais potentes e pesadas. Os motores que equipavam os robôs da classe monotipo do Festival Internacional de Robotique eram os motores dos vidros eléctricos dos automóveis Renault Clio.
- Os motores de limpa pára-brisas consomem ainda mais e não foram dimensionados para serem reversíveis, embora o possam ser. Apresentam consumos ainda mais elevados mas é possível controlá-los. As várias versões do robô IQxx, contavam com um motor deste tipo para rodar a direcção do robô.
- Existem cada vez mais motores eléctricos nos automóveis sendo a imaginação o limite para a sua aplicação em robôs. Os motores de regulação de faróis, dos espelhos retrovisores, do tecto de abrir, estão disponíveis à espera que alguém os descubra.
- Servos de modelismo – relativamente baratos e adaptavéis a inúmeras aplicações, constituem um recurso interessante. Tipicamente são usados para controlo de posição, mas é possível e frequente modificá-los de modo a torná-los motores de rotação contínua.
- Motores de algumas ferramentas.
- Os berbequins e aparafusadoras eléctricas sem fio constituem uma boa fonte de motores de corrente contínua, de caixas redutoras, de baterias e carregadores a um preço bastante reduzido. Procurando bem e espreitando oportunidades é possível adquirir estas ferramentas a custos por vezes inferior à dezena de Euros.
1.2.3.5 Motores - Conclusões
O custo a que foi possível adquirir algumas aparafusadoras não deixou outra opção para a escolha dos motores.
Conforme indicado nas figuras, depois de desmontadas, cada aparafusadora dispõe de um motor de corrente contínua, uma caixa redutora, um conjunto de baterias, para além de dispor ainda do respectivo carregador.



1.3 Versão p/ computador (PC)
O robô Rasteirinho (00-01-AR, 04/03 ) está adaptado para o controlo via computador pessoal portátil, embora o portátil possa ser retirado (bem como a carta de aquisição de sinais) para permitir outro tipo de controlo.
1.3.1 Cartas de aquisição de sinais e controlo
PMD 1208-LS da Measurement Computing.###
Uma carta de aquisição de sinais e controlo utilizada na versão PC é a PMD 1208-LS da Measurement Computing.

Esta carta liga-se directamente à porta USB de um computador, neste caso, do computador portátil, não necessitando de qualquer alimentação adicional. O número de entradas e saídas digitais e analógicas suportadas é suficiente para esta aplicação.
Para a colocar em funcionamento é necessário correr a instalação através do software Instacal que vem no CD que acompanha a carta ou pode ser descarregado no site da Measurement Computing (download). Para aceder às entradas/saídas da carta através das várias linguagens de programação (Basic, C, Delphi) e sistemas operativos (DOS, Windows) disponíveis, deverá instalar também o
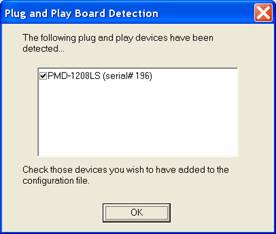
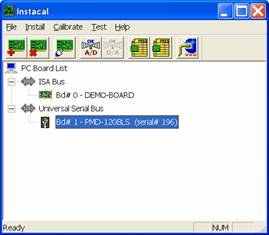
O processo de instalação é clássico e não difere de uma instalação normal de Windows. Depois de instalado o Instacal, se ligar a carta PMD 1208-LS à porta USB do computador deverá ver a carta ser detectada automaticamente pelo “plug & play” do Windows e depois ela aparecerá como a segunda carta instalada no sistema (a primeira que o Instacal apresenta é uma board DEMO que está sempre presente mas é virtual).
Para verificar que a carta PMD 1208-LS funciona correctamente no menu Install escolha a opção “configure” e é conduzido ao menu abaixo.
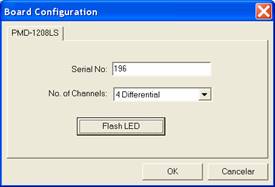
Pressionado “flash led” e se o led verde visível na placa piscar, então há boas possibilidades que a placa esteja bem instalada e que vá funcionar correctamente.
1.3.2 Uma carta para interface de potência com os motores
1.3.3 Uma webcam para aquisição de sinais
A webcam escolhida pode-se encontrar em http://www.chip7.pt/catalogo/detalhes_produto.php?id=3683
Trata-se de uma webcam muito económica que cumpre os requisitos necessários. A instalação não tem nada de mais, bastando introduzir o CD de instalação e ligar a câmara à porta USB livre. A câmara vem com um utilitário para visualizar a imagem. Se vir a imagem normalmente no écran, então há boas possibilidades que a webcam esteja bem instalada e que vá funcionar correctamente.
1.3.4 Versão p/ Autómato Programável
### ainda não disponível
1.3.5 Versão p/ Carta c/ Microcontrolador
### ainda não disponível
1.3.6
1.3.7 Versão p/ Palm ou Pocket PC
### ainda não disponível
1.3.8 Custos