Centro de Sistemas Inteligentes
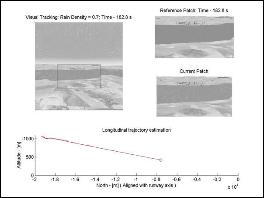
Aterragem Automática Assistida por Visão
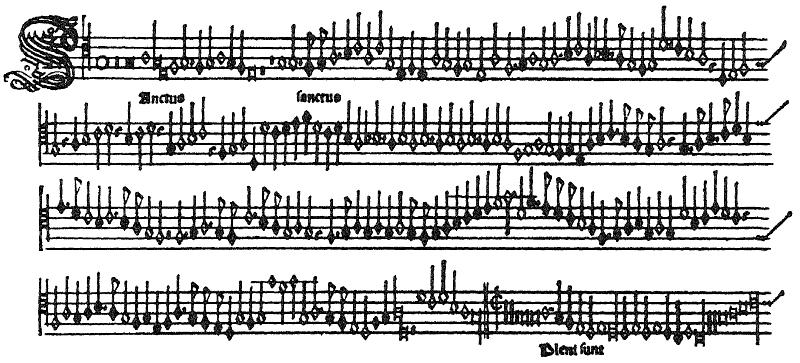
Classificação, Indexação e Inspecção de ImagensO projecto Classificação, Indexação e Inspecção de Imagens (CLIMA), financiado pela Fundação para a Ciência e a Tecnologia, sob o programa POSC, de 1 de Setembro de 2005 até 31 de Agosto de 2007, teve por principal objectivo desenvolver uma metodologia geral, apoiada por um programa de computador, para classificar, indexar e inspeccionar um vasto leque de imagens correspondendo a superfícies naturais, como mármores ou tecidos. Isto pode facilmente generalizar-se a imagens de documentos antigos, como livros com tipos tipográficos antiquados, caracteres manuscritos, ou notação musical antiga. O problema pode considerar-se como pertencendo à importante classe de indexação de conteúdos baseada em imagens. Os principais resultados do projecto foram uma plataforma de classificação e um demonstrador industrial.
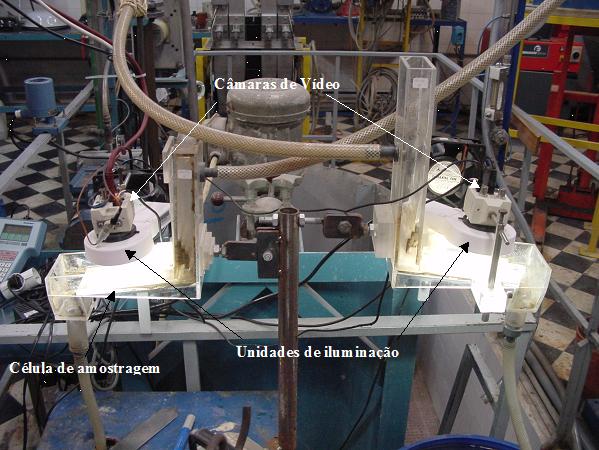
Controlo de uma Coluna de FlutuaçãoApós a extracção, o minério pode ser separado, por adição de reagentes apropriados, em colunas de flutuação, cujo nome deriva da forma geométrica do aparelho. Ao contrário das máquinas de flutuação convencionais, agitadas mecanicamente, que tendem a usar tanques rectangulares relativamente pouco profundos, as colunas têm alturas que tipicamente se acham entre 8 m e 15 m.
No projecto APTDEC, desenvolveram-se estratégias de controlo supervisor aplicadas a processos complexos de separação sólido-sólido (altamente não-linear), baseadas no Controlo Preditivo baseado em Modelo, com teste de variantes decorrentes da aplicação de técnicas de decisão fuzzy. Os objectivos fundamentais do projecto consistiram no desenvolvimento, implementação e avaliação da estratégia de controlo conducente à optimização dos parâmetros de um processo de separação (concentração) sólido-sólido: qualidade (teor) e produtividade (recuperação), através da definição de valores óptimos dos setpoints de variáveis de controlo/manipuláveis. Os modelos utilizados baseiam-se em sistemas de inferência fuzzy. Para a definição e avaliação dos critérios e constrangimentos de controlo foram utilizadas funções de pertença permitindo determinar o grau de admissibilidade da violação das restrições (fuzzy criteria). Todas as técnicas estudadas foram implementadas e testadas em tempo real na instalação piloto laboratorial, que consiste numa coluna de flutuação, equipamento acessório --- tanques, condicionadores --- e de toda a instrumentação (sensores, actuadores, PLC) necessária ao controlo.
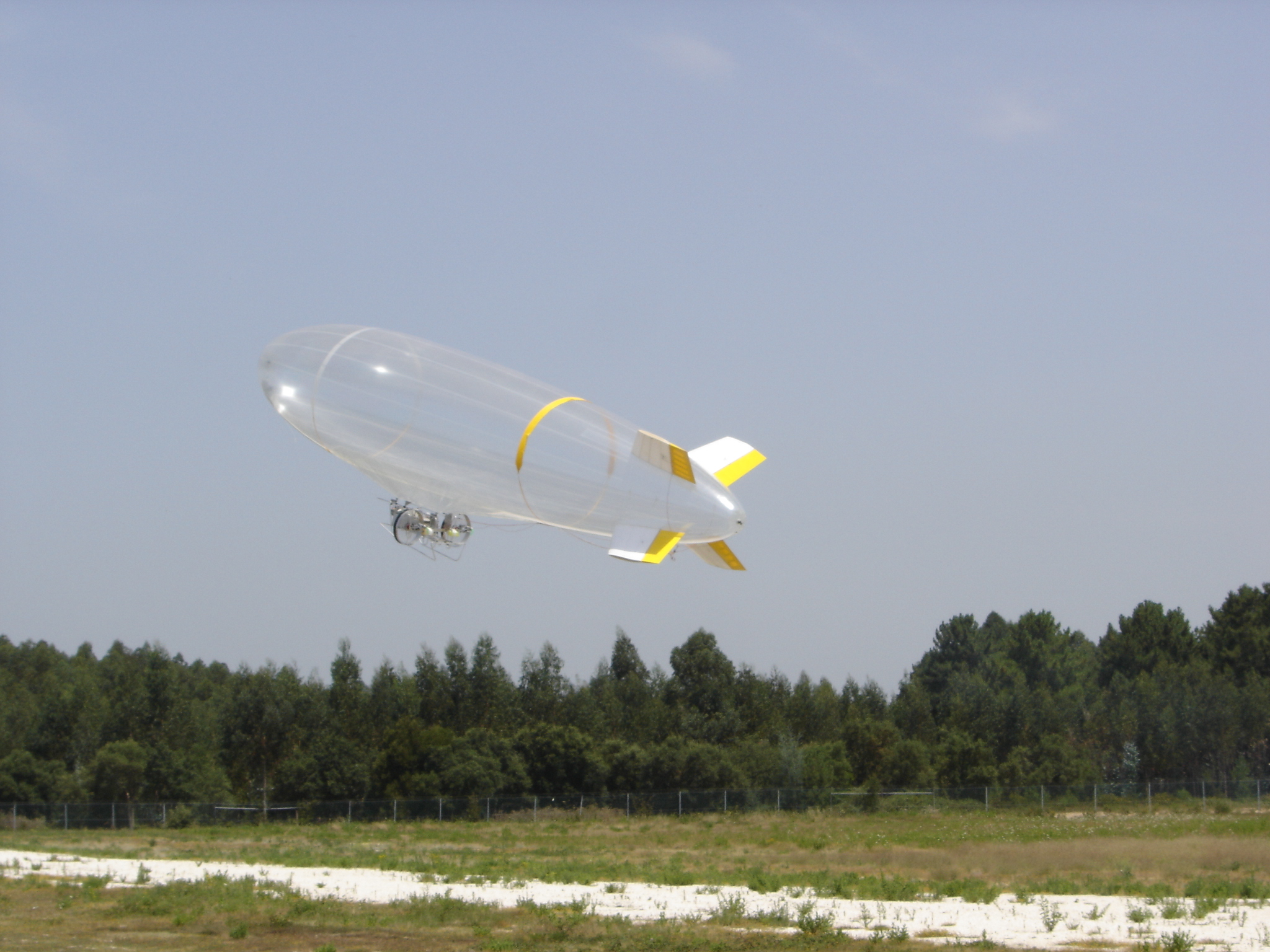
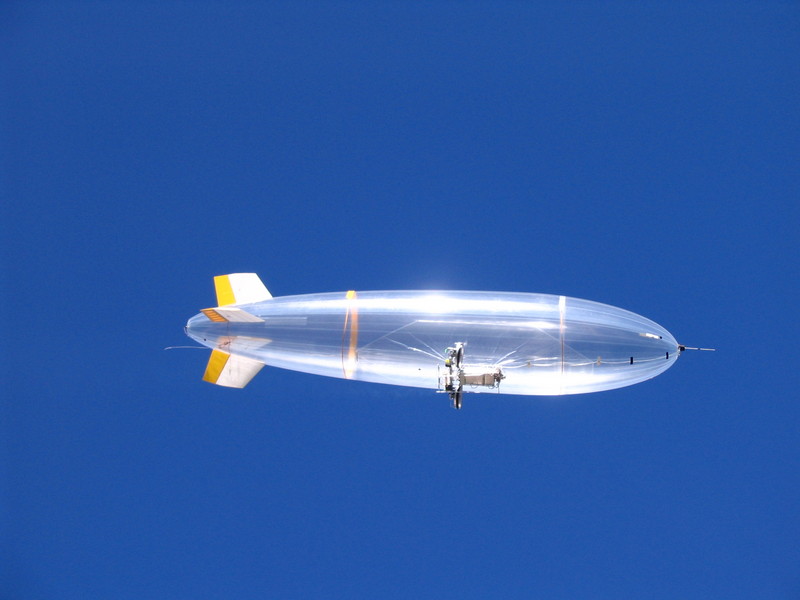
Desenvolveu-se ainda um sistema de visão para avaliar o conteúdo em ferro da polpa na coluna, a partir da sua cor. DIVA - Dirigível Instrumentado para Vigilância AéreaO DIVA (Dirigível Instrumentado para Vigilância Aérea) têm, como possíveis aplicações, a monitorização e vigilância aérea de estradas, fogos florestais, ou linhas de alta tensão. Entre as vantagens do dirigível como plataforma utilizada poderíamos citar a sua estabilidade intrínseca, a sua economia de utilização, a reduzida poluição, a sua capacidade de se deslocar a velocidades baixas ou de pairar.
A fase prolongada de esquecimento dos dirigíveis resultou num conhecimento menor da sua utilização. Um primeiro objectivo do projecto é de participar num melhor conhecimento das suas características de voo e propor soluções alternativas utilizando as técnicas de controlo mais recentes.
Um segundo objectivo é explorar a mobilidade do balão para desenvolver um sistema de vigilância baseada em imagens que supervisione e reconheça o movimento de objectos e permita a inspecção de superfícies de terreno a partir de mapas digitais construídos a partir de imagens adquiridas por câmaras transportadas pelo dirigível a baixa/média altitude.
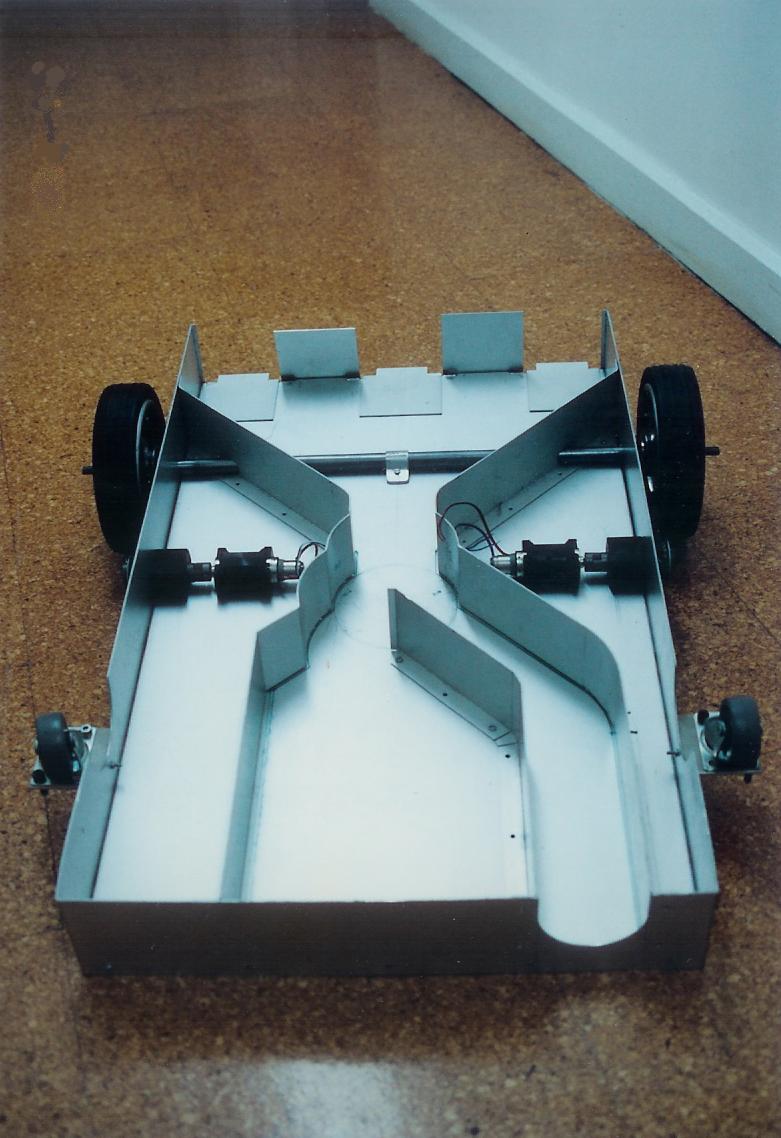
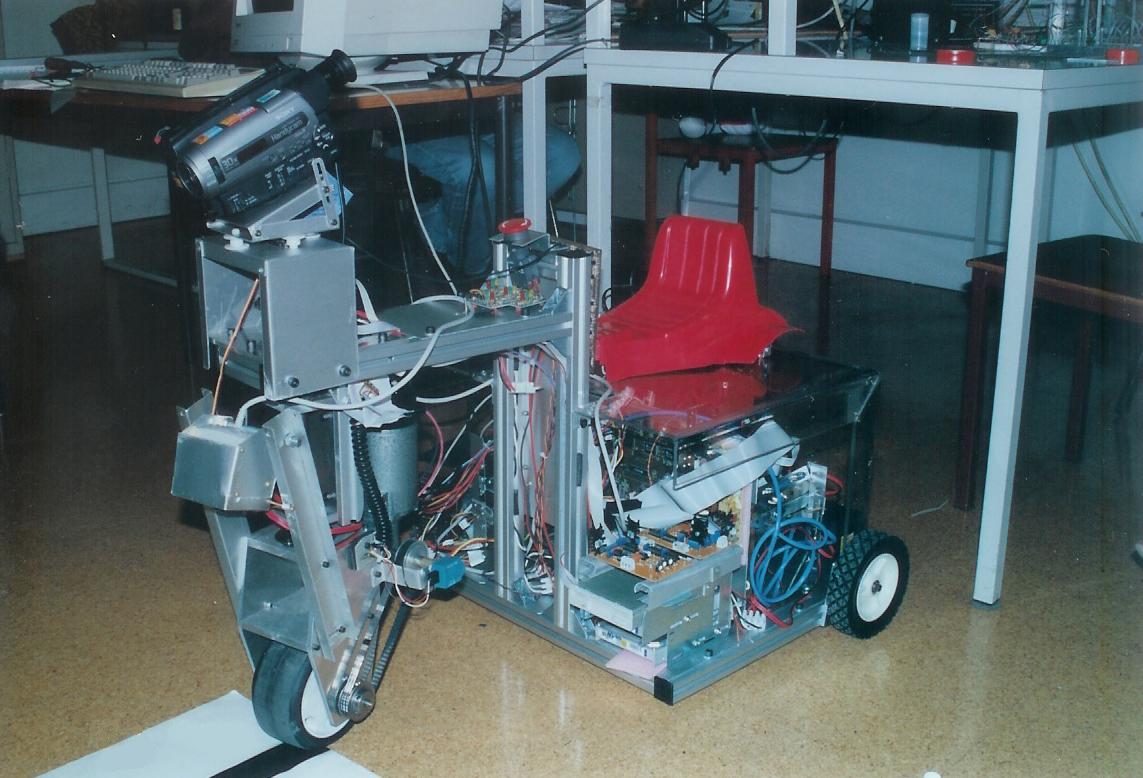
Robôs Móveis «Rasteirinhos»
Foram desenvolvidos ainda outros robôs móveis, como o robô abaixo.
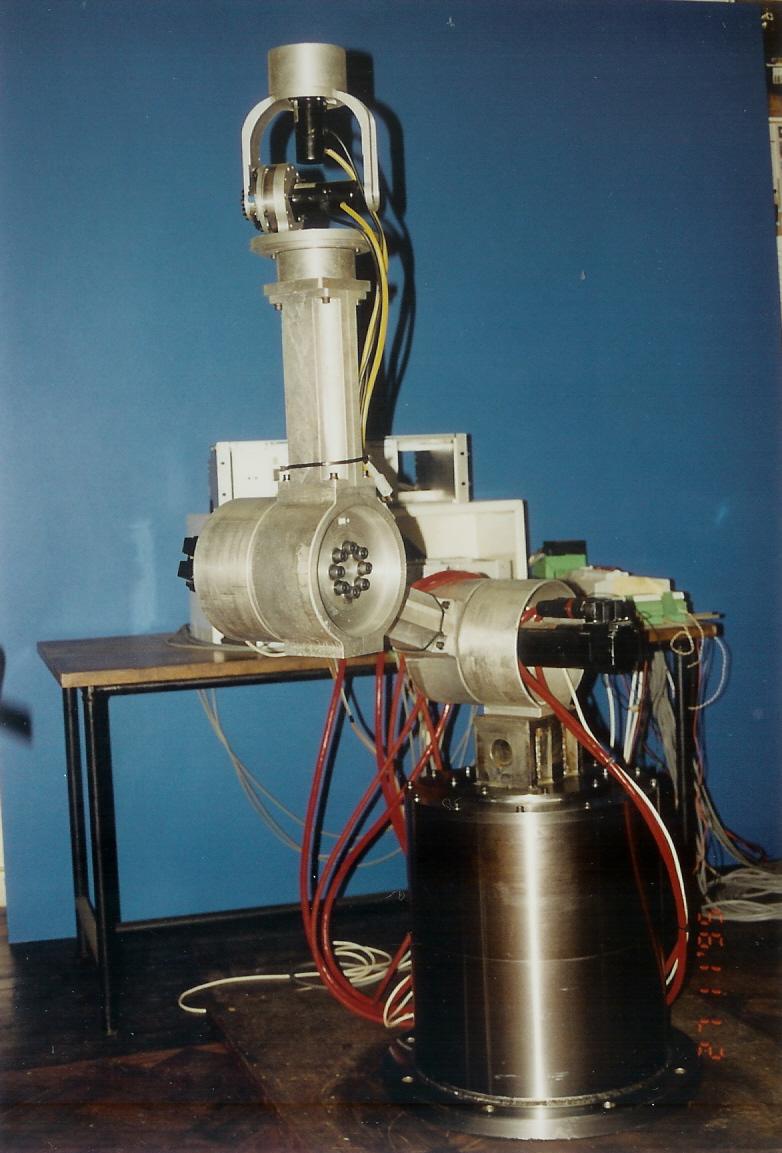
Cirurgia Ortopédica Assistida Roboticamente
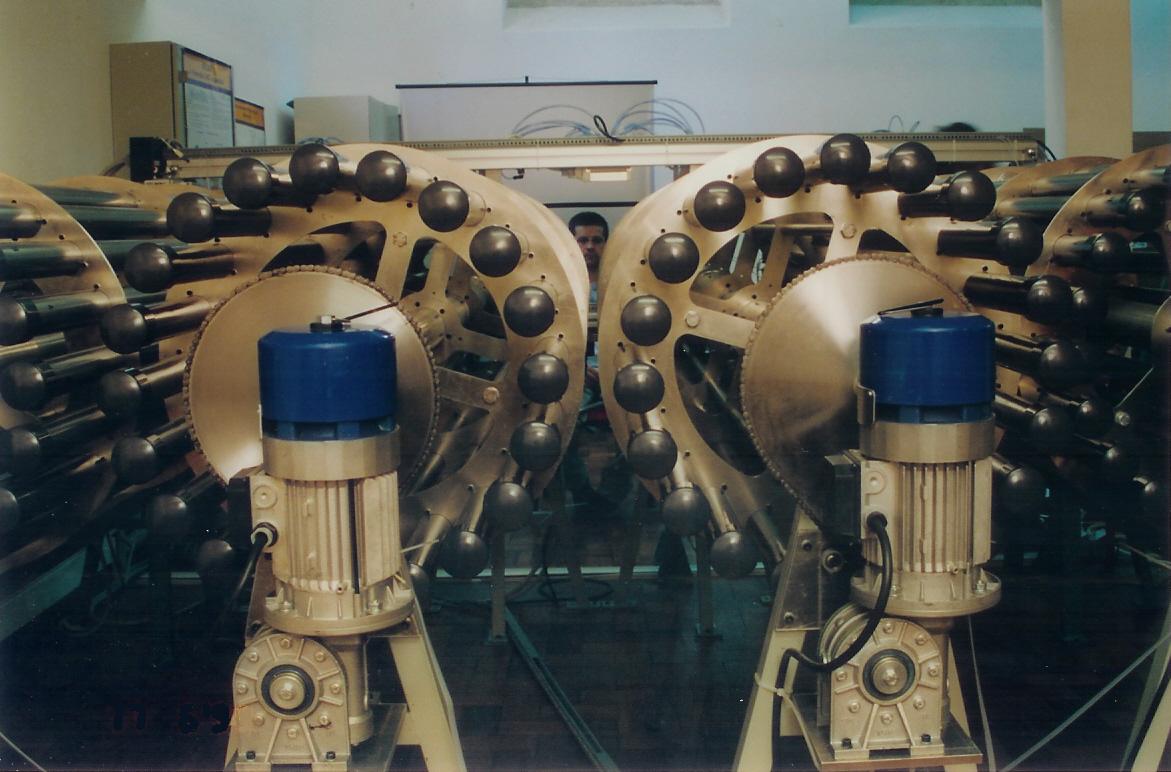
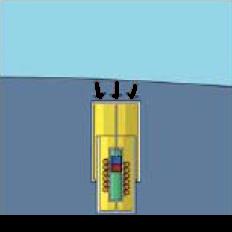
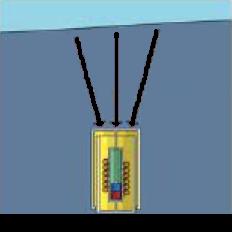
Controlo de Conversores de Energia das OndasAs ondas do mar são uma fonte de energia renovável. Correspondem, em todo o mundo, a uma potência estimada de 2 TW, e é possível converter parte desta potência em electricidade. Estão a ser desenvolvidos vários aparelhos com este fito, designados Conversores de Energia das Ondas (CEOs), usando diferentes princípios de funcionamento, e concebidos para diferentes tipos de localização. A modelação e o controlo têm um papel importante no melhoramento da eficiência alcançada. Está-se a desenvolver investigação em estratégias de controlo para CEOs, considerando-se diferentes aparelhos de tipos diferentes. Entre eles acha-se o Archimedes Wave Swing de primeira geração, que é um CEO submerso, para aplicação off-shore, com um diâmetro desprezável face a um comprimento de onda típico (e portanto designado absorsor pontual), que consiste em duas partes principais, cilíndricas e ocas, o flutuador e o silo, montadas numa estrutura que as conjuga, havendo ar preso entre ambas. O silo está fixo à estrutura e por meio dela ao fundo o mar; o flutuador é livre para arfar (mover-se para cima e para baixo), dentro de limites impostos por fins de curso. O princípio de funcionamento é simples: quando passa sobre o AWS uma crista de onda, a altura de água aumenta, a pressão que comprime o ar no seu interior também, e o flutuador desce; quando passa sobre o AWS uma cava de onda, a altura de água decresce, a pressão também, o ar expande-se e o flutuador sobe. A arfagem do flutuador é convertida em electricidade por um gerador eléctrico linear.
|
|||||||||||