Centre of Intelligent Systems
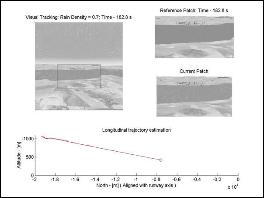
Vision-Assisted Automatic Landing
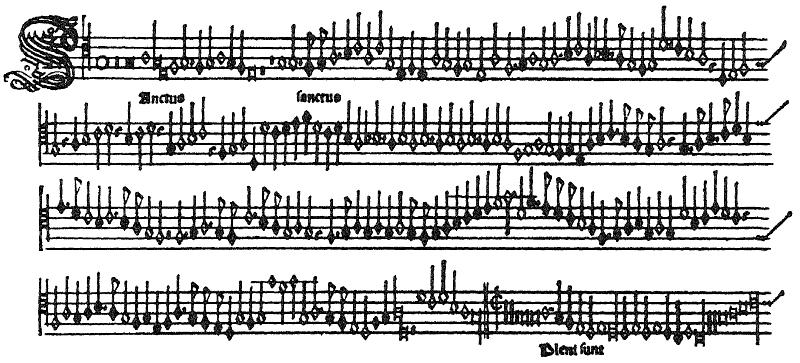
Image Based Classification Indexing and InspectionThe Image Based Classification Indexing and Inspection (CLIMA) project, financed by Fundação para a Ciência e a Tecnologia, under programme POSC, from September 1, 2005 to August 31, 2007, had as its main goal to develop a general methodology, supported by a software application, to perform classification, indexing and inspection applied to a vast range of images corresponding to natural surfaces, such as marbles or fabrics. This can be easily extended to images from old documents as old fonts or manuscripts characters or to ancient musical notes. This problem can be considered to belong to the important issue of contents based image indexing. A classification platform and an industrial demonstrator were the main results of this project.
Flotation Column ControlAfter mining, minerals can be separated, by addition of appropriate reagents, in flotation columns, that derive their name from the geometric shape of the vessel. Unlike conventional mechanically agitated flotation machines which tend to use relatively shallow rectangular tanks, column cells are tall vessels with heights typically ranging from 8 m to 15 m.
In the APTDEC project, supervising control strategies were developed for application in complex (highly non-linear) processes of separation of solids, using Model-based Predictive Control, testing different fuzzy decision techniques. The fundamental objectives of this project were the development, implementation and evalution of the control strategy leading to the optimisation of the parameters of a process of separation of solids (concentration increase): quality (content) and productivity, by defining optimal values for the setpoints of control variables. The models are based upon fuzzy inference systems. To define and evaluate control criteria and constraints, fuzzy criteria membership functions were used so as to determine how admissible each constraint violation might be. All techniques were implemented and tested in real time in a laboratory pilot plant consisting in a floatation column, accesories---tanks, conditioners---and all the instruments (sensors, actuators, PLCs) needed for control.
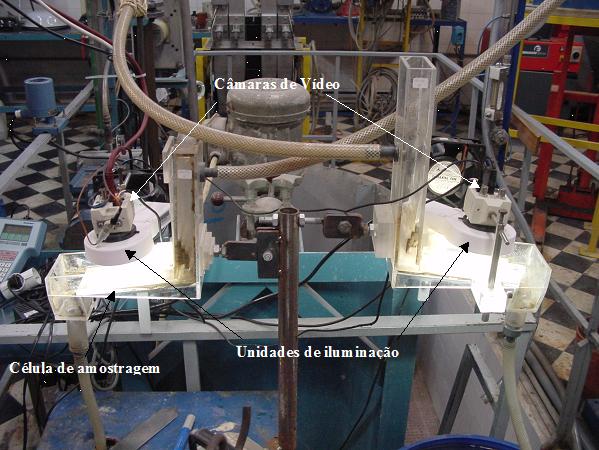
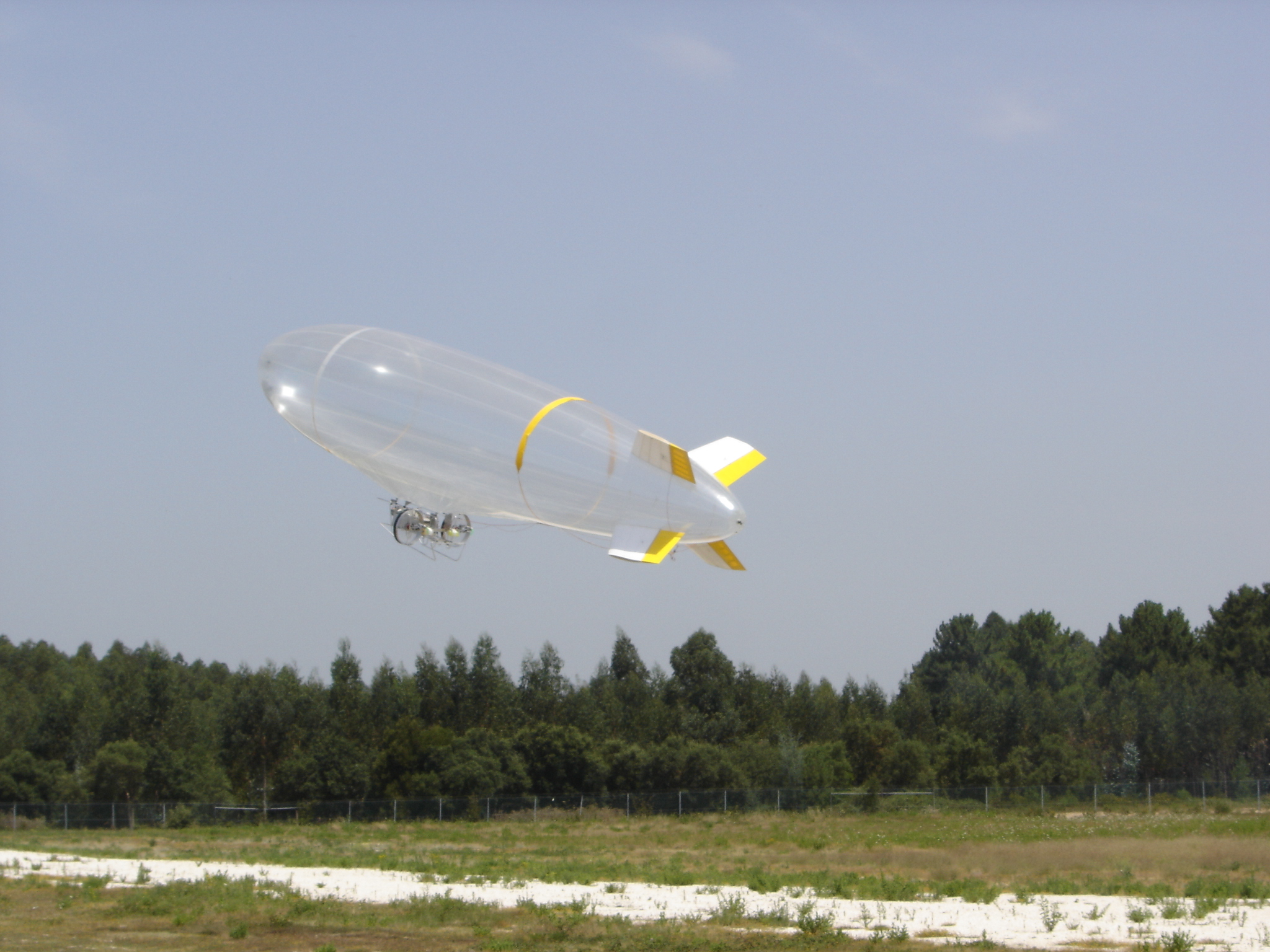
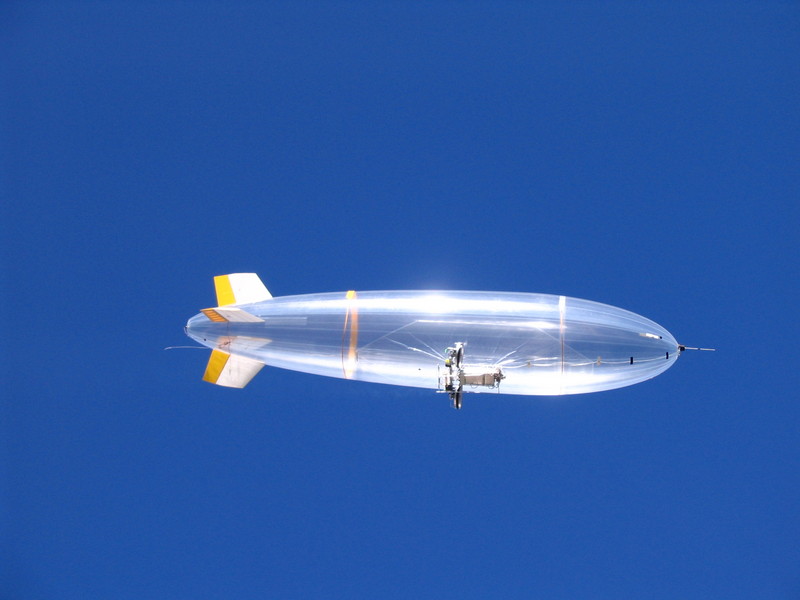
A vision system was also developed to assess the iron content of the pulp in the column from its colour. DIVA - Instrumented Directible for Air VigilanceDIVA (Instrumented directible for Air Surveillance) has, as possible applications, the surveillance of roads, forest fires, or high voltage cables. A directible is advantegeous for such tasks because of its stability, low price, low polution emittance, and its ability of moving slowly or stopping.
Because of not having been used for a long time, knowledge about the use of directibles is reduced. So a first objective of the project is to better know the directible's flight characteristics and propose alternative solutions using the most recent control techniques.
A second objective is to explore the directible's mobility to develop an image-based surveillance system to track and identify moving objects and inspect the landscape according to digital maps built from middle/low height images obtained by directible-borne cameras.
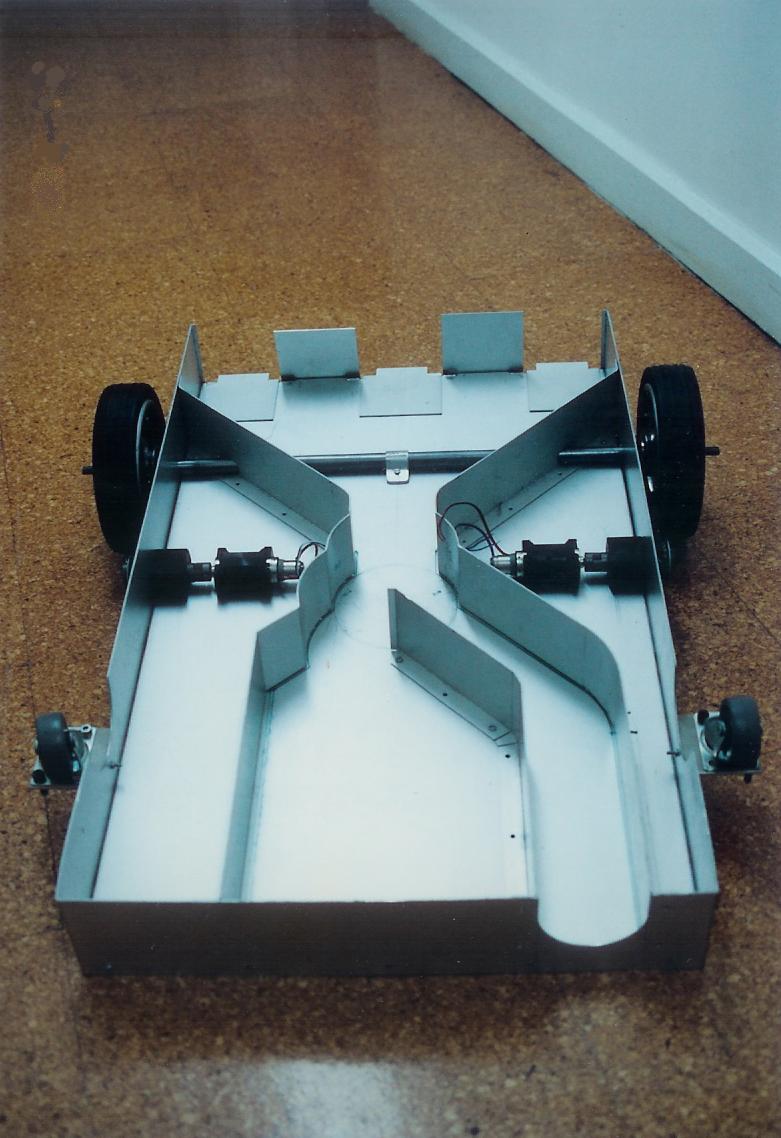
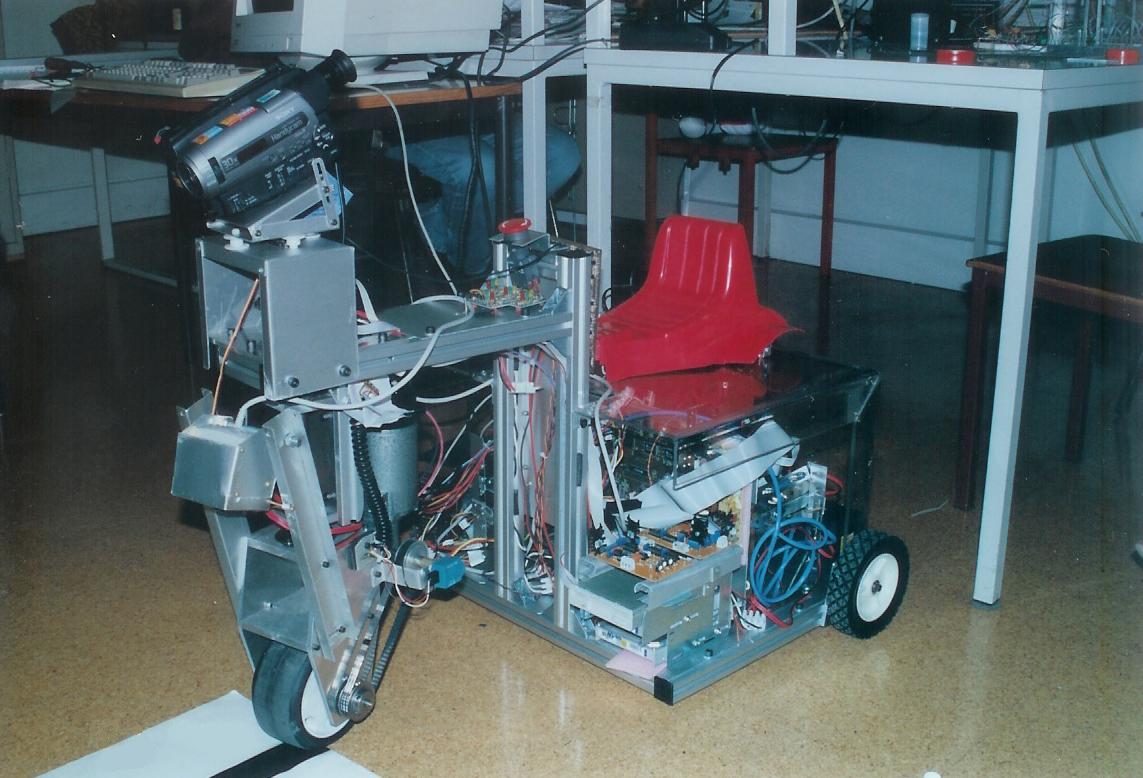
Mobile Robots «Rasteirinhos»
Other mobile robots have been developed, such as the one below.
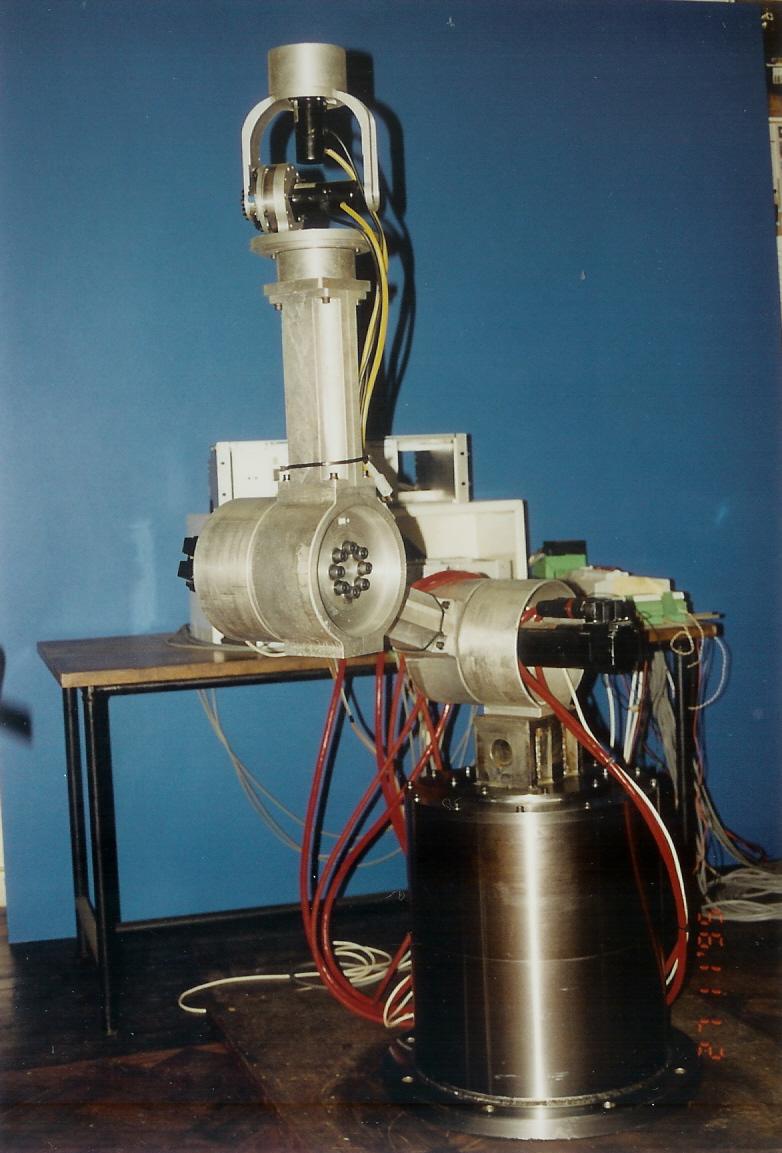
Robot-Assisted Orthopedic Surgery
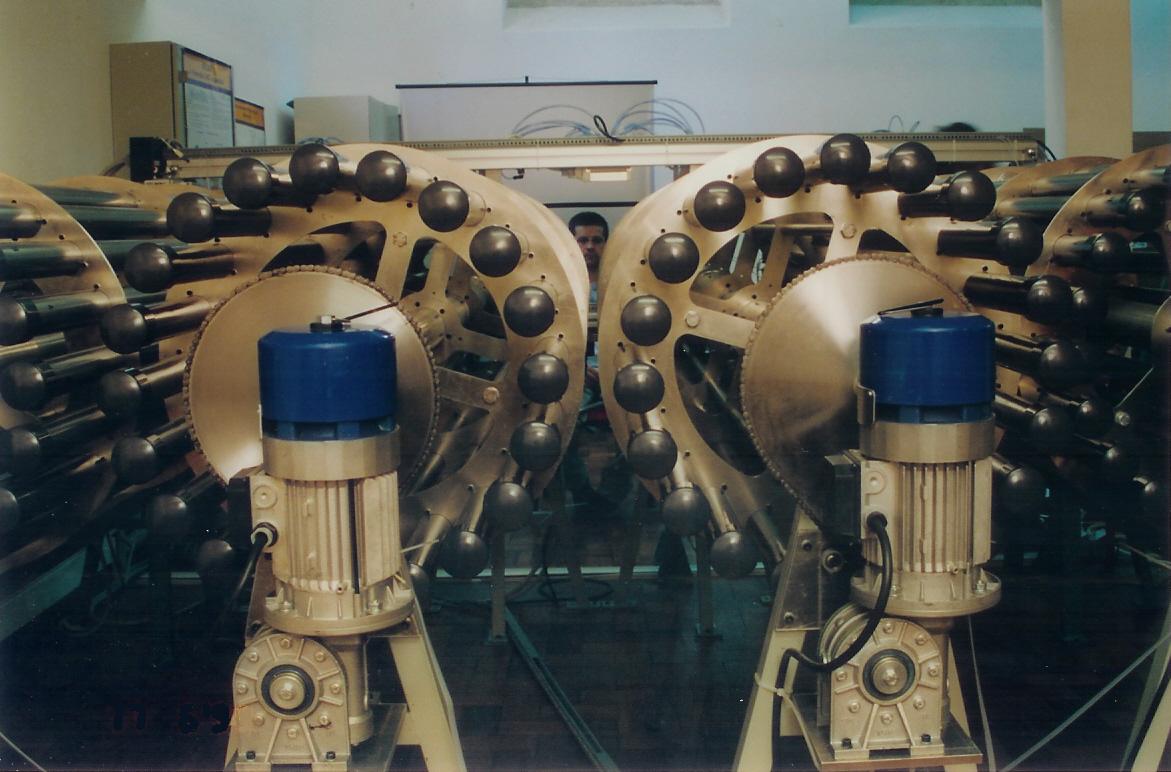
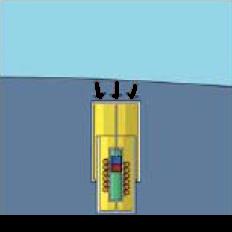
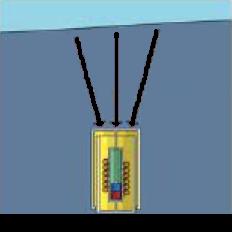
Control of Wave Energy ConversorsSea waves are a source of renewable energy. They represent an estimated power of 2 TW worldwide, and it is possible to convert part of this wave power into electricity. Several devices for this purpose, known as wave energy converters (WECs), are under development, using different working principles and designed for different types of locations. Modelling and control play an important role in improving the efficiency achieved. Reasearch is being carried out to develop control strategies for WECs. Several different devices, of different types, are being considered. Among them is the first-generation Archimedes Wave Swing, which is an off-shore submerged WEC, with a diameter neglectable when compared to a typical wave length (thus termed a point absorber), consisting in two main cylindrical and hollow parts, the floater and the silo, mounted in a structure to keep them together, with air trapped within floater and silo. The silo is fixed to the structure and thereby to the sea-bottom; the floater is free to heave up and down, within the range of mechanical endstops. The working principle is simple: when a wave crest passes over the AWS, the height of water increases, so does the pressure compressing the air within, and the floater moves down; when a wave trough passes over the AWS, the height of water decreases, so does the pressure, the air expands and the floater moves up. The heaving motion of the floater is converted into electricity by an electrical linear generator.
|
|||||||||||