![[Logo] Dept. Eng. Mecânica](img/LogoCAII.gif)
Laboratórios da Área Científica de Controlo Automação e Informática Industrial
Estruturas e Compósitos AdaptativosResponsável: Prof. José Sá da Costa Automação IndustrialResponsável: Prof. Caldas Pinto O objectivo do laboratório de Automação Industrial é apoiar o ensino avançado nesta área. Neste laboratório, os alunos programam autómatos industriais para controlar processos básicos, como tapetes transportadores, válvulas electro-pneumáticas ligadas a cilindros pneumáticos, e outros sistemas. São também introduzidos vários sensores lógicos. Para controlo remoto, usa-se uma plataforma especial com autómatos e leds, permitindo aos alunos preparar alguns trabalhos desde casa usando a Internet.
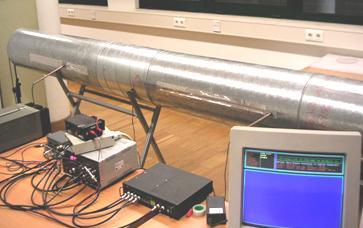
Identificação e ControloResponsável: Prof. Miguel Ayala Botto Controlo Integrado da ProduçãoResponsável: Prof. João Miguel Sousa MecatrónicaResponsável: Prof. Carlos Cardeira Electrónica e InstrumentaçãoResponsável: Prof. Jorge Martins Robótica I e IIResponsável: Prof. Jorge Martins AcústicaResponsável: Prof. José Sá da Costa No laboratório de Acústica desenvolve-se investigação na área do controlo activo estrutural e acústico e do controlo activo de ruído. Esta última tecnologia pode ser aplicada, por exemplo, a meios de transporte (como comboios) ou a condutas de ventilação.
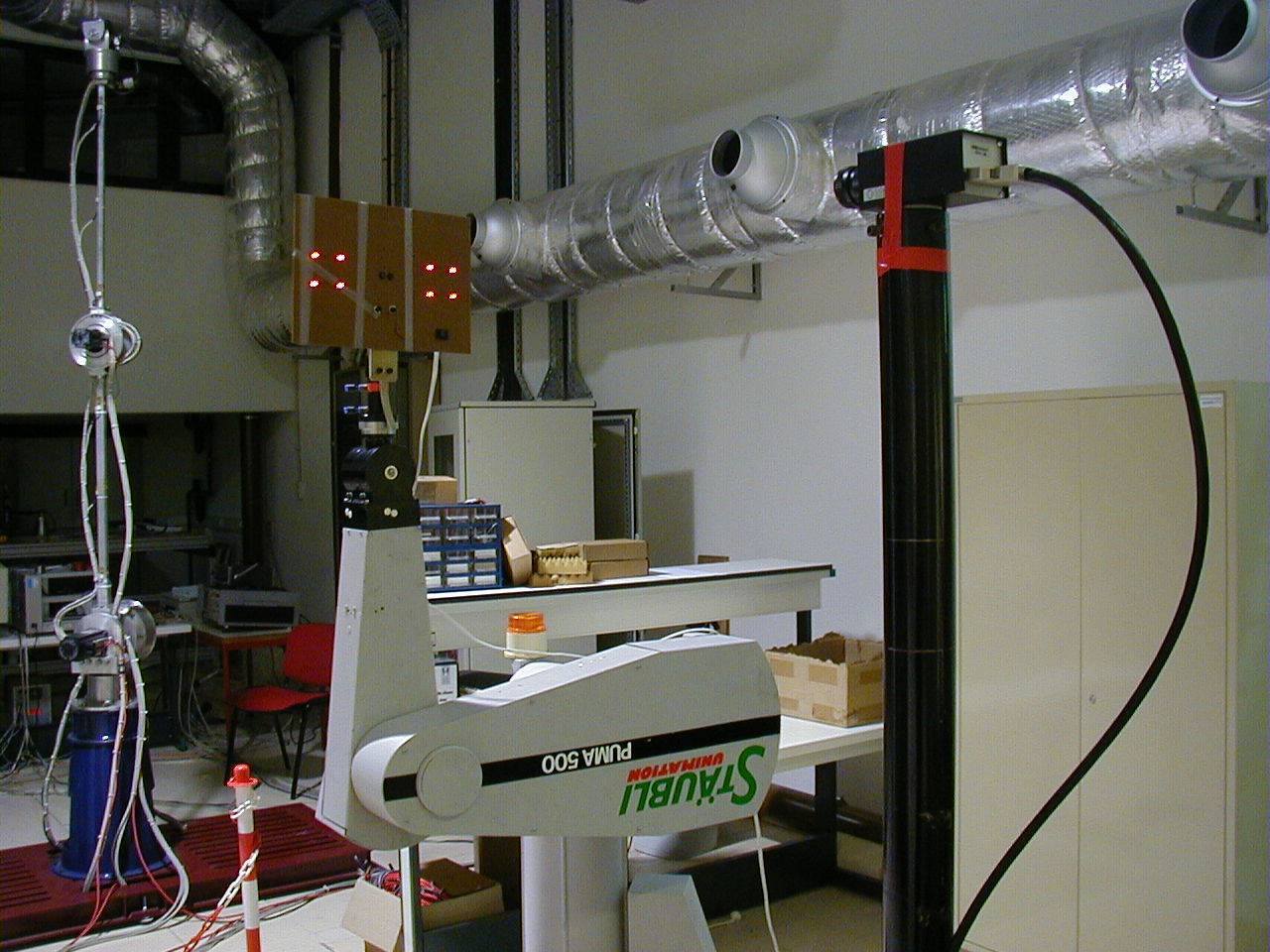
VisãoResponsável: Prof. João Caldas Pinto O objectivo do laboratório de Visão é apoiar trabalho de investigação na área da inspecção visual aplicada a problemas industriais e a visão robótica, área esta na qual se desenvolveram vários algoritmos para controlar um robô planar e um robô PUMA. De momento, desenvolvem-se algoritmos na área da cirurgia ortopédica assistida por robô.
HumanóidesResponsável: Prof. Miguel Ayala Botto
|
||||||||