![[Logo] Mechanical Engineering Department](img/LogoCAII.gif)
Laboratories of the Scientific Area of Control, Automation and Industrial Informatics
Adaptive Structures and Composite MaterialsFaculty member in charge: Prof. José Sá da Costa Industrial AutomationFaculty member in charge: Prof. Caldas Pinto The aim of the Industrial Automation laboratory is to support the teaching of graduate courses in this area. In this laboratory students will program PLC (Programmable Logic Controllers) to control basic processes as conveyors, electric-pneumatic valves connected to pneumatic cylinders and other systems. They will be also introduced to a set of logic sensors. A special platform with PLC and leds is used for remote control, allowing students to prepare some works at home through the Internet.
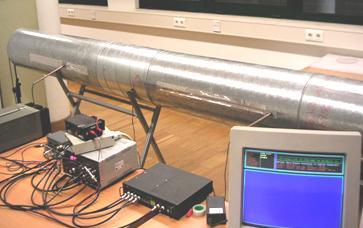
Identification and ControlFaculty member in charge: Prof. Miguel Ayala Botto Integrated Control of ProductionFaculty member in charge: Prof. João Miguel Sousa MecatronicsFaculty member in charge: Prof. Carlos Cardeira Electronics and InstrumentationFaculty member in charge: Prof. Jorge Martins Robotics I and IIFaculty member in charge: Prof. Jorge Martins AcousticsFaculty member in charge: Prof. José Sá da Costa In the Acoustics laboratory, research experiments are carried out in the area of active structural and acoustic control and in the area of active noise control. The latter can be applied, for instance, in transportation systems (such as trains) and ventilation ducts.
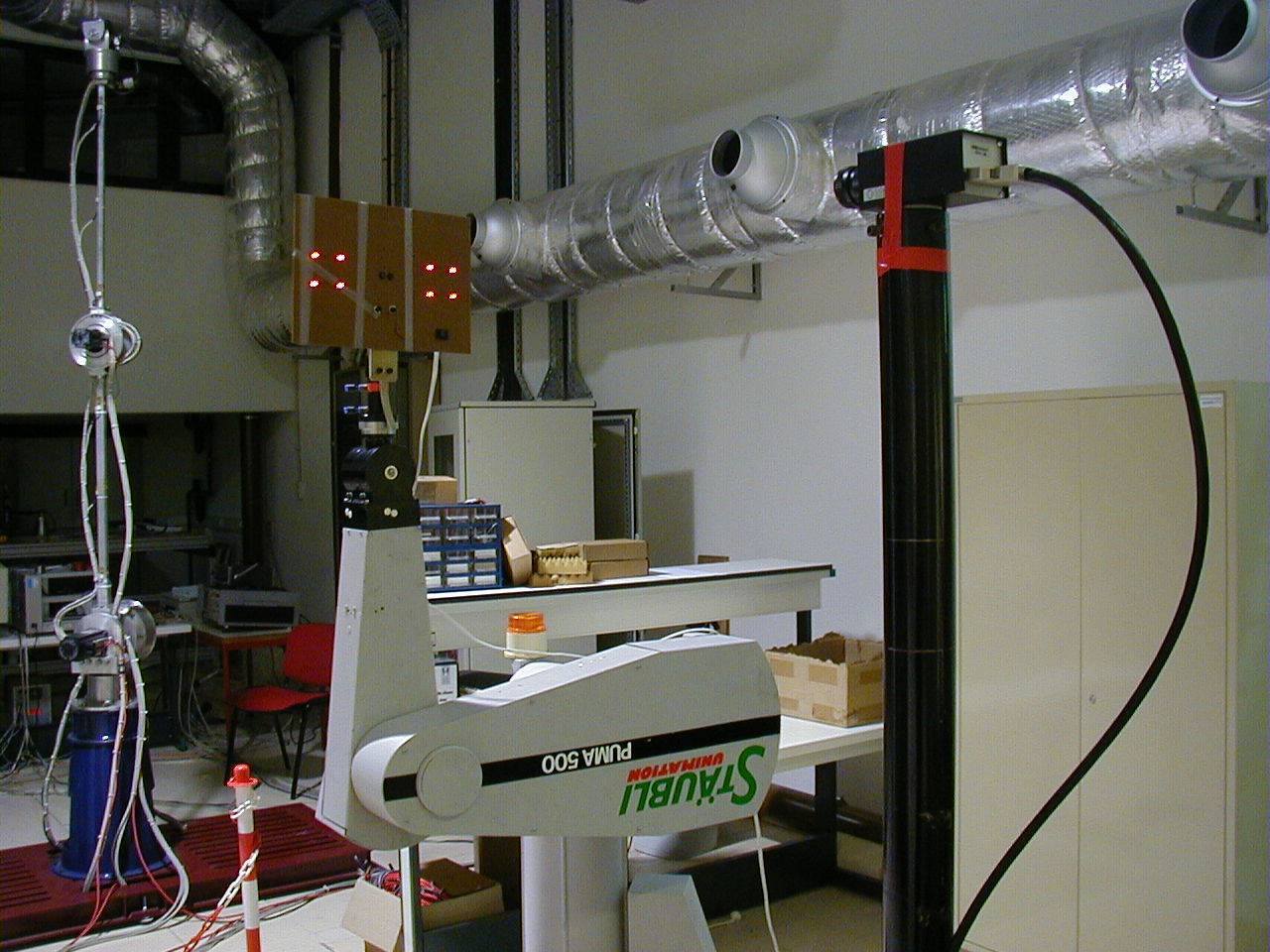
VisionFaculty member in charge: Prof. João Caldas Pinto The aim of the Vision laboratory is to support research work in the area of visual inspection applied to industrial problems and in robot vision were several visual servoing algorithms have been developed to control a planar robot and a PUMA robot. Currently algorithms are being developed on the area of robot assisted orthopedic surgery.
Humanoid robotsFaculty member in charge: Prof. Miguel Ayala Botto
|
||||||||